Semantic Mapping at the RSE-lab
The goal of this project is to generate maps that describe
environments in terms of objects and places. Such representations
contain far more useful information than traditional maps, and enable
robots to interact with humans in a more natural way.
Project Contributors
Dieter Fox, Bertrand Douillard, Stephen Friedman, Benson Limketkai, Fabio Ramos
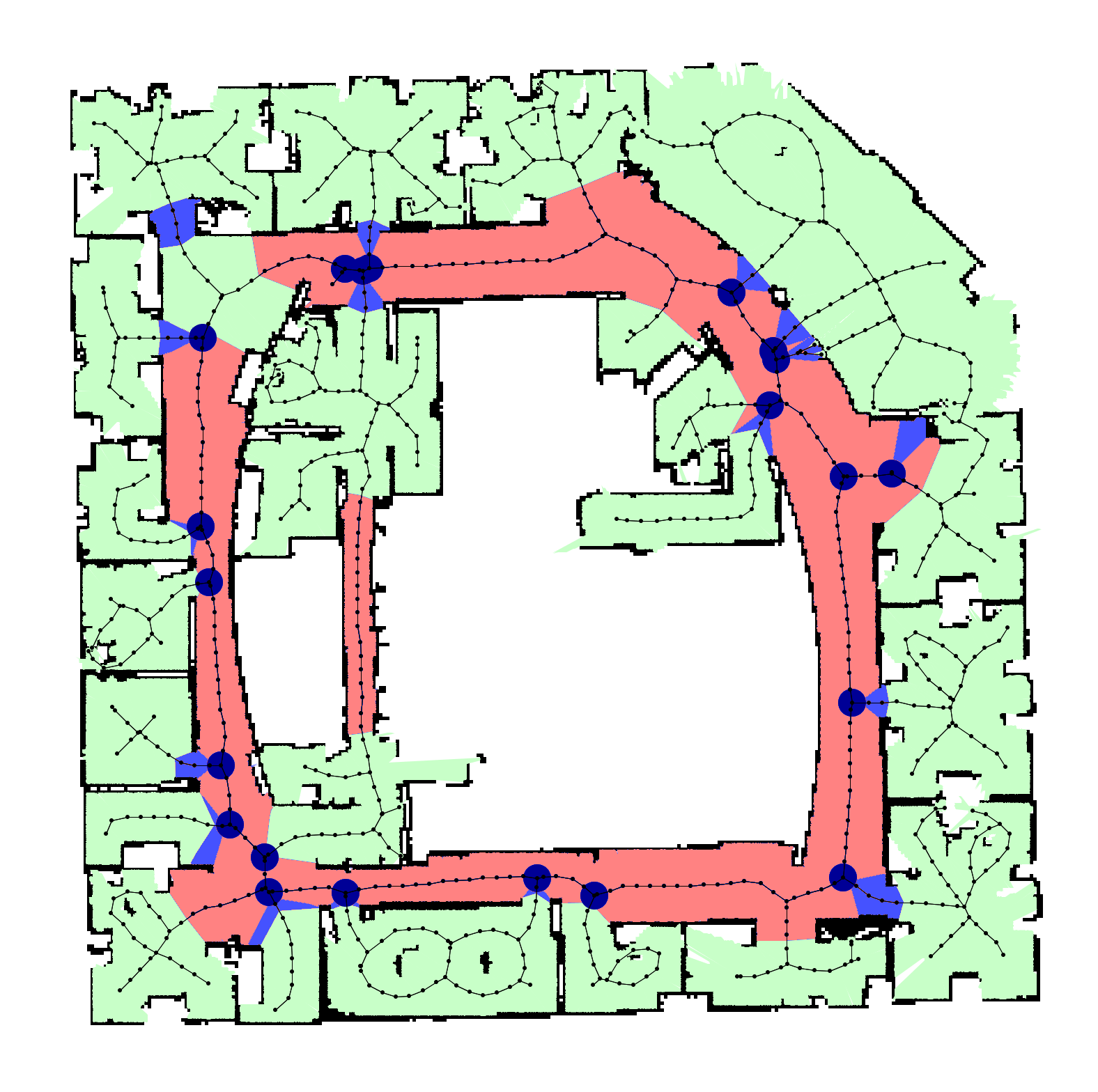
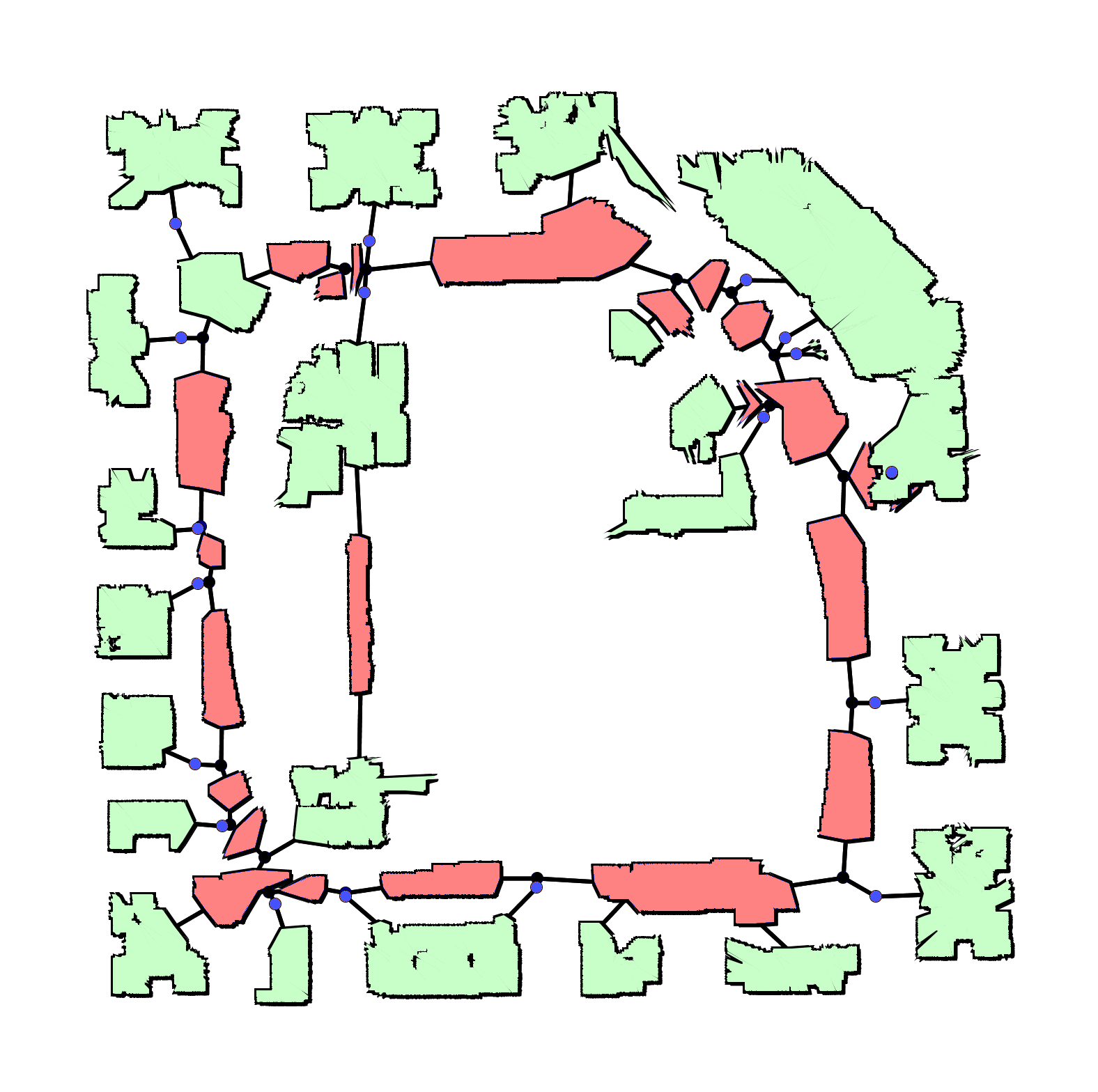
Learning to label places
To label the places in an indoor environment, our robot first builds an occupancy grid map using a laser range finder (click here for info on the mapping step). It then labels every point on the Voronoi graph of this map by taking local shape and connectivity information into account. The parameters of the underlying statistical model are learned from previously explored environments.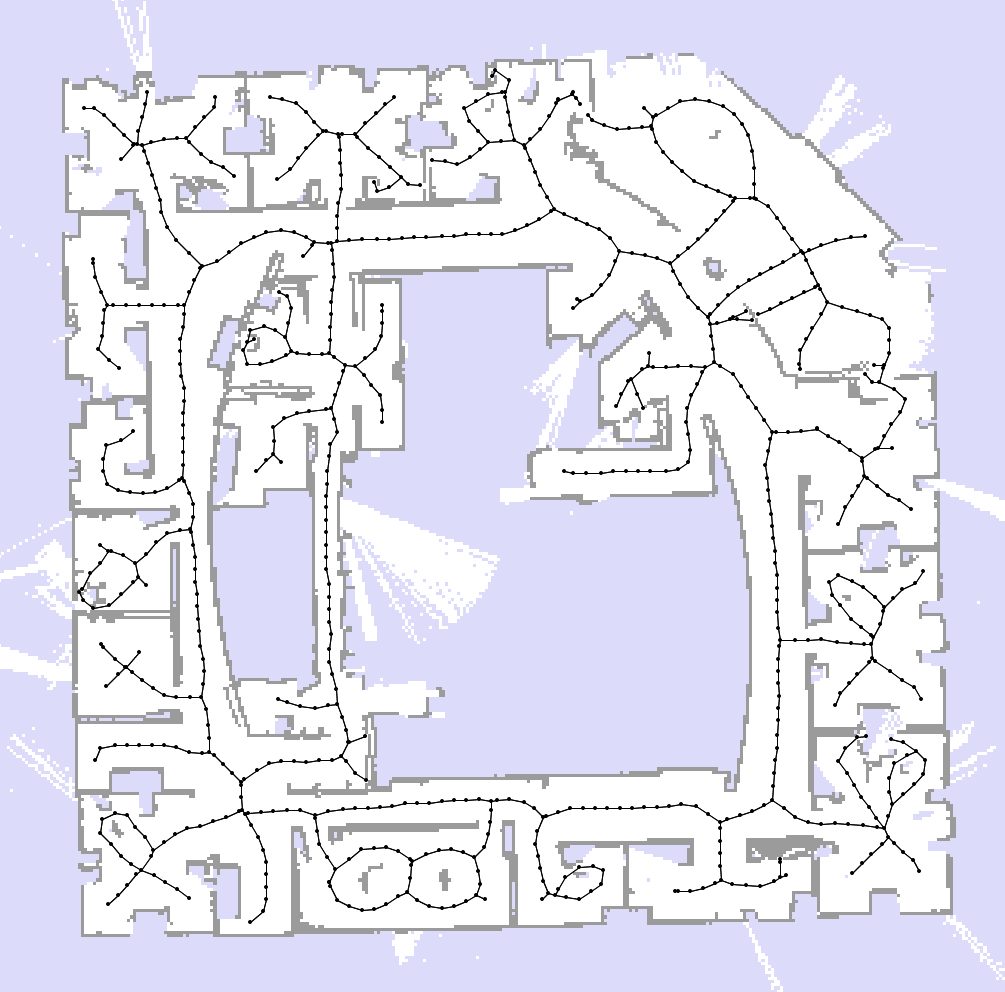 |
|
 |
Object detection in urban environments
In collaboration with the Australian Centre for Field Robotics, we use a car equipped with a laser range finder and a camera to detect objects in urban environments. The laser points are projected into the camera images and then labeled by the type of object they point at. This labeling is done using a Conditional Random Field that takes both shape and appearance information into account. Click here to see an animation demonstrating the approach.Main publications
-
Laser and Vision Based Outdoor Object Mapping
B. Douillard, D. Fox, and F. Ramos. RSS-08. -
A Spatio-Temporal Probabilistic Model for Multi-Sensor Multi-Class
Object Recognition.
B. Douillard, D. Fox, and F. Ramos. ISRR-07. -
A Spatio-Temporal Probabilistic Model for Multi-Sensor Object
Recognition.
B. Douillard, D. Fox, and F. Ramos. IROS-07. -
Voronoi Random Fields: Extracting the Topological Structure of
Indoor Environments via Place Labeling.
S. Friedman, H. Pasula, and D. Fox. IJCAI-07. -
Training Conditional Random Fields using Virtual Evidence
Boosting.
L. Liao, T. Choudhury, D. Fox, and H. Kautz. IJCAI-07. -
Relational Object Maps for Mobile Robots.
B. Limketkai, L. Liao, and D. Fox. IJCAI-05.