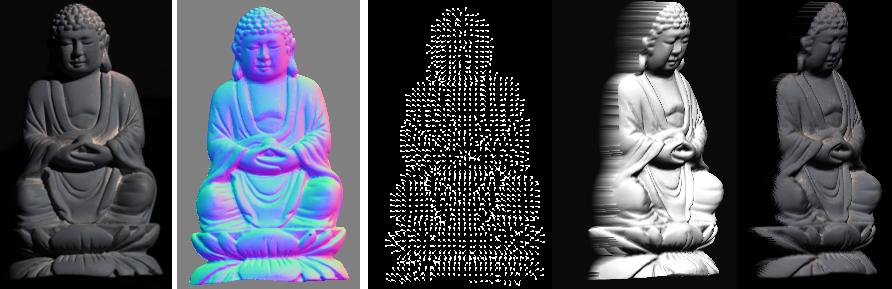
Description
Calibration
Before we can extract normals from images, we have to calibrate our capture setup. This includes determining the lighting intensity and direction, as well as the camera response function. For this project, we have already taken care of two of these tasks: First, we have linearized the camera response function, so you can treat pixel values as intensities. Second, we have balanced all the light sources to each other, so that they all appear to have the same brightness. You'll be solving for albedos relative to this brightness, which you can just assume is 1 in some arbitrary units. In other words, you don't need to think too much about the intensity of the light sources.
The one remaining calibration step we have left for you is calibrating lighting directions. One method of determining the direction of point light sources is to photograph a shiny chrome sphere in the same location as all the other objects. Since we know the shape of this object, we can determine the normal at any given point on its surface, and therefore we can also compute the reflection direction for the brightest spot on the surface.
Normals from Images
The appearance of diffuse objects can be modeled as
 where I is the pixel intensity, kd is the albedo, and L is the lighting
direction (a unit vector), and n is the unit surface normal. (Since our
images are already balanced as described above, we can assume the incoming
radiance from each light is 1.) Assuming
a single color channel, we can rewrite this as
where I is the pixel intensity, kd is the albedo, and L is the lighting
direction (a unit vector), and n is the unit surface normal. (Since our
images are already balanced as described above, we can assume the incoming
radiance from each light is 1.) Assuming
a single color channel, we can rewrite this as
 so the unknowns are together. With three or more different image samples
under different lighting, we can solve for the product
so the unknowns are together. With three or more different image samples
under different lighting, we can solve for the product
 by solving a linear least squares problem. The objective function is:
by solving a linear least squares problem. The objective function is:
To help deal with shadows and noise in dark pixels, its helpful to weight the solution by the pixel intensity: in other words, multiply by Ii:
The objective Q is then minimized with respect to g. Once we have the vector g = kd * n, the length of the vector is kd and the normalized direction gives n.
Solving for color albedo
This gives a way to get the normal and albedo for one color channel. Once we have a normal n for each pixel, we can solve for the albedos by another least squares solution. But this one ends up being a simple projection. The objective function is

To minimize it, differentiate with respect to kd, and set to zero:


Writing Ji = Li . n, we can also write this more concisely as a
ratio of dot products:
 This can be done for each channel independently to obtain a per-channel albedo.
This can be done for each channel independently to obtain a per-channel albedo.
Least squares surface fitting
Next we'll have to find a surface which has these normals. If a surface having these normals exists, then we can use path integration, as described in Forsyth and Ponce. But such a surface might not exist at all! We will again use a least-squares technique to find the surface that best fits these normals. Here's one way of posing this problem as a least squares optimization:
If the normals are perpendicular to the surface, then they'll be perpendicular to any vector on the surface. We can construct vectors on the surface using the edges that will be formed by neighbouring pixels in the height map. Consider a pixel (i,j) and its neighbour to the right. They will have an edge with direction
(i+1, j, z(i+1,j)) - (i, j, z(i,j)) = (1, 0, z(i+1,j) - z(i,j))
This vector is perpendicular to the normal n, which means its dot product with n will be zero:
(1, 0, z(i+1,j) - z(i,j)) . n = 0

Similarly, in the vertical direction:

We can construct similar constraints for all of the pixels which
have neighbours, which gives us roughly twice as many constraints as
unknowns (the z values). These can be written as the matrix equation
Mz = v. The least squares solution solves the equation
 However, unlike the Lucas-Kanade algorithm, the matrix
However, unlike the Lucas-Kanade algorithm, the matrix
 will still be really really big! It will have as many rows and columns as
their are pixels in your image. Even for a small image of 100x100
pixels, the matrix will have 10^8 entries!
will still be really really big! It will have as many rows and columns as
their are pixels in your image. Even for a small image of 100x100
pixels, the matrix will have 10^8 entries!





