 Forrest
Gump shaking hands with J.F.K.
Forrest
Gump shaking hands with J.F.K. Assigned: Friday, Jan 18, 2002
Due: Thursday,
Jan 31, 2002 (by 11:59pm)
Demo Schedule: Friday, Feb 1, 2002 (12:00-1:30pm)
| Slot 1 | Slot 2 | |
| 12:00 | David Dewey | Eung-Hun Kim |
| 12:10 | Kelvin Lau | Chun-Hao Ma |
| 12:20 | ||
| 12:30 | Alice Lin | |
| 12:40 | Chris Twigg | Eugene Hsu |
| 12:50 | ||
| 1:00 | Devang Patel | |
| 1:10 | Sam Riesland | Louis Valentine |
| 1:20 | Daniel Stein | John Troy |
In this project, you will create a tool that allows a user to cut an object out of one image and paste it into another. The tool helps the user trace the object by providing a "live wire" that automatically snaps to and wraps around the object of interest. You will then use your tool to create a composite image. The class will vote on the best composites.
Forrest
Gump shaking hands with J.F.K.
You will be given a working skeleton program, which provides the user interface elements and data structures that you'll need for this program. This skeleton is described below. We have provided a sample solution executable and test images. Try this out to see how your program should run.
This program is based on the paper Intelligent Scissors for Image Composition, by Eric Mortensen and William Barrett, published in the proceedings of SIGGRAPH 1995. The way it works is that the user first clicks on a "seed point" which can be any pixel in the image. The program then computes a path from the seed point to the mouse cursor that hugs the contours of the image as closely as possible. This path, called the "live wire", is computed by converting the image into a graph where the pixels correspond to nodes. Each node is connected by links to its 8 immediate neighbors. Note that we use the term "link" instead of "edge" of a graph to avoid confusion with edges in the image. Each link has a cost relating to the derivative of the image across that link. The path is computed by finding the minimum cost path in the graph, from the seed point to the mouse position. The path will tend to follow edges in the image instead of crossing them, since the latter is more expensive. The path is represented as a sequence of links in the graph.
Next, we describe the details of the cost function and the algorithm for computing the minimum cost path. The cost function we'll use is a bit different than what's described in the paper, but closely matches what was discussed in lecture.
As described in the lecture notes, the image is represented as a graph. Each pixel (i,j) is represented as a node in the graph, and is connected to its 8 neighbors in the image by graph links (labeled from 0 to 7), as shown in the following figure.
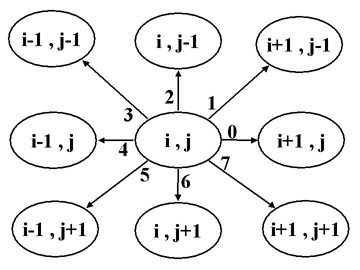
Among the 8 links, two are horizontal (links 0 and 4), two are vertical (links 2 and 6), and the rest are diagonal. The magnitude of the intensity derivative across the diagonal links, e.g. link1, is approximated as:
D(link1)=|img(i+1,j)-img(i,j-1)|/sqrt(2)
The magnitude of the intensity derivative across the horizontal links, e.g. link
0, is approximated as:
D(link 0)=|(img(i,j-1) + img(i+1,j-1))/2 -
(img(i,j+1) + img(i+1,j+1))/2|/2
Similarly, the magnitude of the intensity derivative across the horizontal links, e.g. ln2, is approximated as:
D(link2)=|(img(i-1,j)+img(i-1,j-1))/2-(img(i+1,j)+img(i+1,j-1))/2|/2.
We compute the cost for each link, cost(link), by the following equation:
cost(link)=(maxD-D(link))*length(link)
where maxD is the maximum magnitude of derivatives across links over in the image, e.g., maxD =
max{D(link) | forall link in the image}, length(link) is the length of the link. For example,
length(link 0) = 1, length(link 1) = sqrt(2) and length(link 2) = 1. If a link lies along an edge in an image, we expect that the intensity derivative
across that link is large and accordingly, the
cost of link is small.
As in the grayscale case, each pixel has eight links. We first compute the magnitude of the intensity derivative across a link, in each color channel independently, denoted as
( DR(link),DG(link),DB(link) ).
Then the magnitude of the color derivative across link is defined as
D(link) = sqrt( (DR(link)*DR(link)+DG(link)*DG(link)+DB(link)*DB(link))/3 ).
Then we compute the cost for link link in the same way as we do for a gray scale image:
cost(link)=(maxD-D(link))*length(link).
Notice that cost(link 0) for pixel (i,j) is the same as cost(link 4) for pixel (i+1,j). Similar symmetry property also applies to vertical and diagonal links.
For debugging perpose, you may want to scale down each link cost by a factor of 1.5 or 2 so that they can be converted to byte format without clamping to[0,255]
initialize each node to the INITIAL state;
set the total cost of seed to be zero and make seed the root of the minimum path tree ( pointing to NULL ) ;
insert seed into pq;
while pq is not empty
extract the node q with the minimum total cost in pq;
mark q as EXPANDED;
for each neighbor node r of q
if r has not been EXPANDED
if r is still INITIAL
make q be the predecessor of r ( for the the minimum path tree );
set the total cost of r to be the sum of the total cost of q and link cost from q to r as its total cost;
insert r in pq and mark it as ACTIVE;
else if r is ACTIVE, e.g., in already in the pq
if the sum of the total cost of q and link cost between q and r is less than the total cost of r
update q to be the predecessor of r ( for the minimum path tree );
update the total cost of r in pq;
We provide the priority queue functions that you will need in the skeleton code (implemented as a binary heap). These are: ExtractMin, Instert, and Update.
We provide a skeleton code for you to start. The code consists of the almost the same file structures as we use for the project 0, execpt that FltDesignUI.* are replace by SicssorPanelUI.*, and correlation.* are replaced by iScissor.*. A new file is PriorityQueue.h, which defined several template classes for dynamic array, binary heap, and doubly linked list. They are useful for representing contours and searching the minimum path tree. As in project 0, imgView contains most of the data structures and handles interface messages. You will work with iScissor.cpp most often.
The main data structure that you will use in Project 1 is the Pixel Node.
Pixel Node
Use the following Node structure when computing the minimum path tree.struct Node{
double linkCost[8];
int state;
double totalCost;
Node *prevNode;
int column, row;
//other unrelated fields;}
linkCost contains the costs of each link, as described above.
state is used to tag the node as being INITIAL, ACTIVE, or EXPANDED
during the min-cost tree computation.
totalCost is the minimum total cost from this node to the seed
node.
prevNode points to its predecessor along the minimum cost path from
the seed to
that node.
column and row remember the position of the node in original image so
that its neighboring nodes can be located.
For visualization purposes, we provide code to convert a pixel node array into an image that displays the computed cost values in the user interface. This image buffer, called Cost Graph, has the structure shown below. Cost Graph has 3W columns and 3H rows and is obtained by expanding the original image by a factor of 3 in both the horizontal and vertical directions. For each 3 by 3 unit, the RGB(i,j) color is saved at the center and the eight link costs, as described in the Cost Function section, are saved in the 8 corresponding neighbor pixels. The link costs shown are the average of the costs over the RGB channels, as described above (NOT the per-channel costs). The Cost Graph may be viewed as an RGB image in the interface, (dark = low cost, light = high cost).
|
|
|
|||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||
|
|
|
File-->Save Mask, save compositing mask for PhotoShop;
Tool-->Scissor, open a panel to choose what to draw in the window
Work Mode:
Image Only: show original image without contour superimposed on it;
Image with Contour: show original image with contours superimposed on it;
Debug Mode:
Pixel Node: Draw a cost graph with original image pixel colors at the center of each 3by3 window, and black everywhere else;
Cost Graph: Draw a cost graph with both pixel colors and link costs, where you can see whether your cost computation is reasonable or not, e.g., low cost (dark intensity) for links along image edges.
Path Tree: show minimum path tree in the cost graph for the current seed; You can use the counter widget to simulate how the tree is computed by specifying the number of expanded nodes. The tree consists of links with yellow color. The back track direction (towards the seed) goes from light yellow to dark yellow.
Min Path: show the minimum path between the current seed and the mouse position;
To use the "path tree" and "min path" in debug mode, you need to have an active seed point. the active seed point is the last "left click / ctrl + left click" point on the contour you are working with, e.g., the contour that has not yet be committed by "enter / ctrl + enter". (See the short cut keys below)
Ctrl+"+", zoom in;
Ctrl+"-", zoom out;
Ctrl+Left click first seed;
Left click, following seeds;
Enter, finish the current contour;
Ctrl+Enter, finish the current contour as closed;
Backspace, when scissoring, delete the last seed; otherwise, delete selected contour.
Select a contour by moving onto it. Selected contour is red, un-selected ones are green.
All the required work can be done in iScissor.cpp
- implement InitNodeBuf, which takes as input an image of size W by H and an allocated node buffer of the same dimensions, and initializes the column, row, and linkCost fields of each node in the buffer.
- implement LiveWireDP, which takes a node buffer and a seed position as input and computes the minimum path tree from the seed node.
- implement MinimumPath, which takes as input a node buffer and a node position and returns a list of nodes along the minimum cost path from the input node to the seed node in the buffer (the seed has a NULL predecessor).
For this assignment, you will turn in a final image (the artifact) which is a composite created using your program. Your composite can be derived from as many different images as you'd like. Make it interesting in some way--be it humorous, thought provoking, or artistic! You should use your own scissoring tool to cut the objects out and save them to matte files, but then can use Photoshop or any other image editing program to process the resulting mattes (move, rotate, adjust colors, warp, etc.) and combine them into your composite. Instructions on how to do this in Photoshop are provided here. You should still turn in an artifact even if you don't get the program working fully, using the scissoring tool in the sample solution or in Photoshop.
The class will vote on the best composites.
Please turn in the following items:
We are scheduling a demo session (tentatively on Friday, Feb 1 from 12-1:30), where each student will give a 10 minute live demo of their project executable and answer questions about the source code. We'll pass around a signup sheet in class (or post it online) soon. If you can't make this demo, please contact Li to schedule a make-up time.
Here is a list of suggestions for extending the program for extra credit. You are encouraged to come up with your own extensions. We're always interested in seeing new, unanticipated ways to use this program!
![]() One
problem with the live wire is that it prefers shorter paths so will tend to cut
through large object rather than wrap around them. One way to fix this is
specify a specific region in which the path must stay. As long as this
region contains the object boundary but excludes most of the interior, the path
will be forced to follow the boundary. One way of specifying such a region
is to use a thick (e.g., 50 pixel wide) paint brush. Implement this
feature. Note: we already provide support for brushing a region
using a selection buffer, in the same way as for project0.
One
problem with the live wire is that it prefers shorter paths so will tend to cut
through large object rather than wrap around them. One way to fix this is
specify a specific region in which the path must stay. As long as this
region contains the object boundary but excludes most of the interior, the path
will be forced to follow the boundary. One way of specifying such a region
is to use a thick (e.g., 50 pixel wide) paint brush. Implement this
feature. Note: we already provide support for brushing a region
using a selection buffer, in the same way as for project0.
![]() Modify the interface and program to allow blurring the image by different
amounts before computing link costs. Describe your observations on how
this changes the results.
Modify the interface and program to allow blurring the image by different
amounts before computing link costs. Describe your observations on how
this changes the results.
![]() Try different costs functions, for example the method described in Intelligent
Scissors for Image Composition, and modify the user interface to allow
the user to select different functions. Describe your observations
on how this changes the results.
Try different costs functions, for example the method described in Intelligent
Scissors for Image Composition, and modify the user interface to allow
the user to select different functions. Describe your observations
on how this changes the results.
![]() The only point that doesn't snap to edges is the seed. Implement a seed
snapping feature, where the seed is automatically moved to the closest edge.
The only point that doesn't snap to edges is the seed. Implement a seed
snapping feature, where the seed is automatically moved to the closest edge.
![]() Implement path cooling, as described in Intelligent
Scissors for Image Composition.
Implement path cooling, as described in Intelligent
Scissors for Image Composition.
![]() Implement dynamic training, as described in Intelligent
Scissors for Image Composition.
Implement dynamic training, as described in Intelligent
Scissors for Image Composition.
![]()
![]() Implement a live wire with sub-pixel precision. You can find the
position of an edge to sub-pixel precision by fitting
a curve (e.g., a parabola) to the gradient magnitude values across an edge,
and finding the maximum. Another way (more complex but potentially better)
of doing this is given in a follow
on to Mortensen's scissoring paper. It is probably easiest to first
compute the standard (pixel-precision) live wire and then use one of these curve
fitting techniques to refine it.
Implement a live wire with sub-pixel precision. You can find the
position of an edge to sub-pixel precision by fitting
a curve (e.g., a parabola) to the gradient magnitude values across an edge,
and finding the maximum. Another way (more complex but potentially better)
of doing this is given in a follow
on to Mortensen's scissoring paper. It is probably easiest to first
compute the standard (pixel-precision) live wire and then use one of these curve
fitting techniques to refine it.
Last modified on February 14, 2002