where
In this project, we need to implement feature detection, description, and matching for images. At the same time, our algorithm has to be invariant to translation, orientation, scale and illumination.
In the first part, we need to detect feature points for an image. The detector I used is Harris Corner Detector. The Harris Detector is defined as following:
![]()
where ![]() is 5 * 5 gaussian kernel.
is 5 * 5 gaussian kernel.
I used Sobel filter to calculate the gradient in x and y direction, respectively. Then I use the formula:
![]() to calculate the corner strength at each point.
to calculate the corner strength at each point.
The followings are Harris image from Yosemite and Graf imagesets.


After calculating the Harris image for the original image, I chose around 1000 feature points from the Harris image where the value is above the threshold and is local maximum in 3x3 neighborhood. In this process, I did not set the threshold as fixed. Instead, I set the intial value of the threshold 0.9, and then every time when more feature points are needed, the threshold would decrease dynamically, where the step size is 0.9. For example, if the previous threshold is 0.9, then the updated threshold is 0.81 if it is needed.
The following is a couple of sample image with detected points.
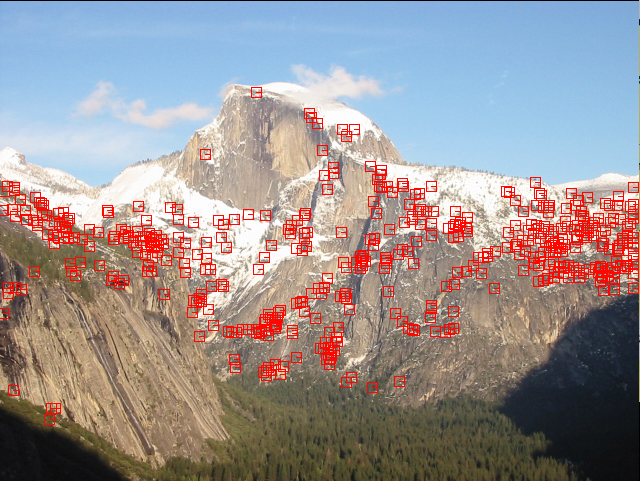

In the feature detection part, we can only decide which points are fiducial points. It is not enough for matching features if we only have the position information of the features. We need to come up with some algorithms to describe features, which is invariant to scale, orientation, and illumination.
First of all, I tried a 5x5 square window around the feature point as the descriptor. It is easy to implement, but it is a good descriptor because it is only invariant to translation but remains scale, orientation, and illumination as problems.
The final decriptor is based on Multiscale Oriented PatcheS descriptor (MOPS), the following is how it works.
For this descriptor,
Here are ROC Curves that compares my descriptor, SIFT descriptor, and just 5x5 window
Yosemite ROC Curve:

I think the reason why Yosemite ROC Curve looks much better than Graf ROC Curve is that there are only translation transformation between two images of Yosemite Set. However, for Graf Set, there are translation, scale, and rotation.
My Descriptor
For this part, I used the formula given from lecture, which is finding two best SSD match, then calculate the ratio of these two SSD as the final score. The advantage of this algorithm is that it can avoid ambiguous match because for the ambiguous match, the algorithm will give large values.
