
We can improve any geometric and semantic scene reconstruction technique by adding a robot: the robot can choose how to use its sensors to get new information. In the case of active vision, the robot can move a camera around to view, e.g., all sides of an object. We use active vision for the map completion and object segmentation problems. Map completion is the problem of viewing all surfaces in a map, and active segmentation involves looking at areas likely to contain object boundaries so that we can determine which are in fact boundaries.
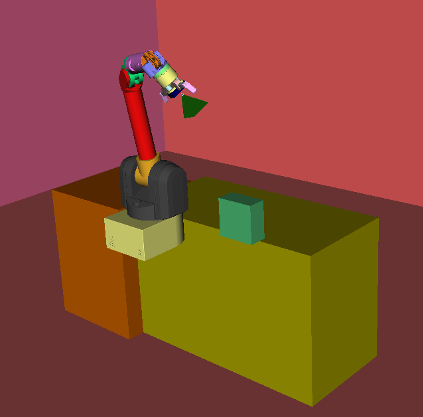
A video of a simulated free-flying camera performing active mapping on the scene shown here: The camera frustum is shown in green; reconstructed surfaces are shown in pink; frontiers (boundaries between free and unseen space) are shown in blue; previously selected view targets are shown as black dots.
The camera frustum is shown in green; reconstructed surfaces are shown in pink; frontiers (boundaries between free and unseen space) are shown in blue; previously selected view targets are shown as black dots.
A video of a simulated free-flying camera performing active mapping on the scene shown here:
The camera frustum is shown in green; reconstructed surfaces are shown in pink; frontiers (boundaries between free and unseen space) are shown in blue; previously selected view targets are shown as black dots.